Connecting the High-speed Data Networks of Autonomous Vehicles
As advanced driver-assistance systems redefine the driving experience, innovations including software-defined vehicles and high-performance computing are reshaping the automotive industry, with interconnects representing the critical link

Most electronic systems deliver and optimize predefined functionality through closely coupled hardware and software elements. Therefore, the perceived natural order of things is for functionality to define the design. As advanced driver-assistance systems redefine the driving experience, innovations including software-defined vehicles and high-performance computing are reshaping the automotive industry, with interconnects representing the critical link. The functionality you drive out of the showroom tomorrow may not be what you trade in five years later. The concept that functionality can be reconfigured after the vehicle is designed upends that perceived natural order of things.
Car manufacturers are eager to deliver greater levels of ADAS until they reach Level 5 autonomy. Some vehicles now offer upgrades, through software, to move from Level 1 to Level 2, with Level 3 trials now sanctioned for some manufacturers. This pathway to full autonomy is almost entirely software-defined.
SDVs will require higher performance computing
Moving from fixed to software-defined functionality is only possible by decoupling software from the underlying hardware. With this decoupling the software can continue to be developed and refined on the same hardware platform and then rolled out to vehicles by over-the-air updates using wireless communications. It follows that SDVs are also required to be connected vehicles.
This approach has clear challenges. The hardware – which is not expected to be redefined or upgraded during the vehicle’s lifetime – must be conceived with future functionality in mind. Again, this disrupts the natural order to optimize the price, power, and performance of hardware for a specific application. Designing systems to accommodate future upgrades and functionality can be costly. The way to avoid this is to push down the impact on the baseline through volume, a concept pioneered by the personal computer business through standardization, founded on an open architecture concept.
Car manufacturers are adopting zonal architecture based on centralized high-performance computing. Automakers and Tier 1 suppliers recognize that centralized server-based HPC architectures will extend the capability of vehicles while reducing complexity.
Predominantly leveraging the virtual run-time environment developed by ETAS and based on the AUTOSAR Adaptive Platform, dispersed electronic control units become zone-oriented and more powerful. Moving to zonal architecture will also reduce the size, weight, and cost of the traditional wiring harness and shift the emphasis to high-speed data transfers.
Sensors provide HPC platforms with the information they need to deliver ADAS functionality. Connected vehicles can create 10s of gigabytes of data every hour, generated by the powertrain (in both internal combustion engines and EVs), advanced sensors that support ADAS, and other configurable features. That figure only goes up as we adopt AI, more autonomy, and greater functionality.
Connected vehicle data protocols
The amount of data transferred by any network is constantly increasing. Image sensors and displays represent most of the data in a connected vehicle. While displays are primarily for drivers and passengers, image sensors support the vehicle’s driver assistance systems.
The type of imaging used by vehicles has rapidly changed. The predominant modalities are lidar, radar, and visible and infrared light. Currently, vision systems based on high-resolution image sensors are useful to both ADAS and the driver. As the industry moves past Level 2.5, the data generated by vision systems will primarily support vehicle autonomy.
The bandwidth demands from radar and lidar sensors are expected to reach 1 Gb/s and 5 Gb/s respectively, per sensor, by 2028. Level 2 vehicles already feature at least two radar sensors and possibly a lidar sensor. Level 3 will push this up to around five radar sensors and at least one lidar sensor. With cameras, the number of high-performance, high-definition imaging sensors for Level 3 ADAS will be close to 15. For Level 4 this number will be closer to 20 and almost 40 for Level 5.
Aggregating imaging data in a zonal architecture with HPC will demand high-bandwidth connections capable of handling multiple 100BASE-T1 and 1000BASE-T1 Ethernet connections. The protocols used include video-specific protocols designed or adapted for the automotive industry, such as MIPI, HDBaseT, Automotive Pixel Link (APIX), Flat Panel Display-Link (FPD-Link), and Gigabit Multimedia Serial Link (GSML), as well as general purpose protocols such as PCIe.
Accommodating as many as 40 high-speed video data channels requires physical connections that can operate reliably in a harsh environment at over 10 GHz and maybe up to 20 GHz. High-performance computing adoption coincides with the shift to zonal architecture, significantly redefining the wiring loom and putting new pressure on connector manufacturers. Innovation in this area has focused on increased channel density, typically with mixed domains, while still reducing the connector’s overall size. Mixed domains imply that data and power are not only on the same connector but also on multiple types of data connections, each with its own electromagnetic constraints.
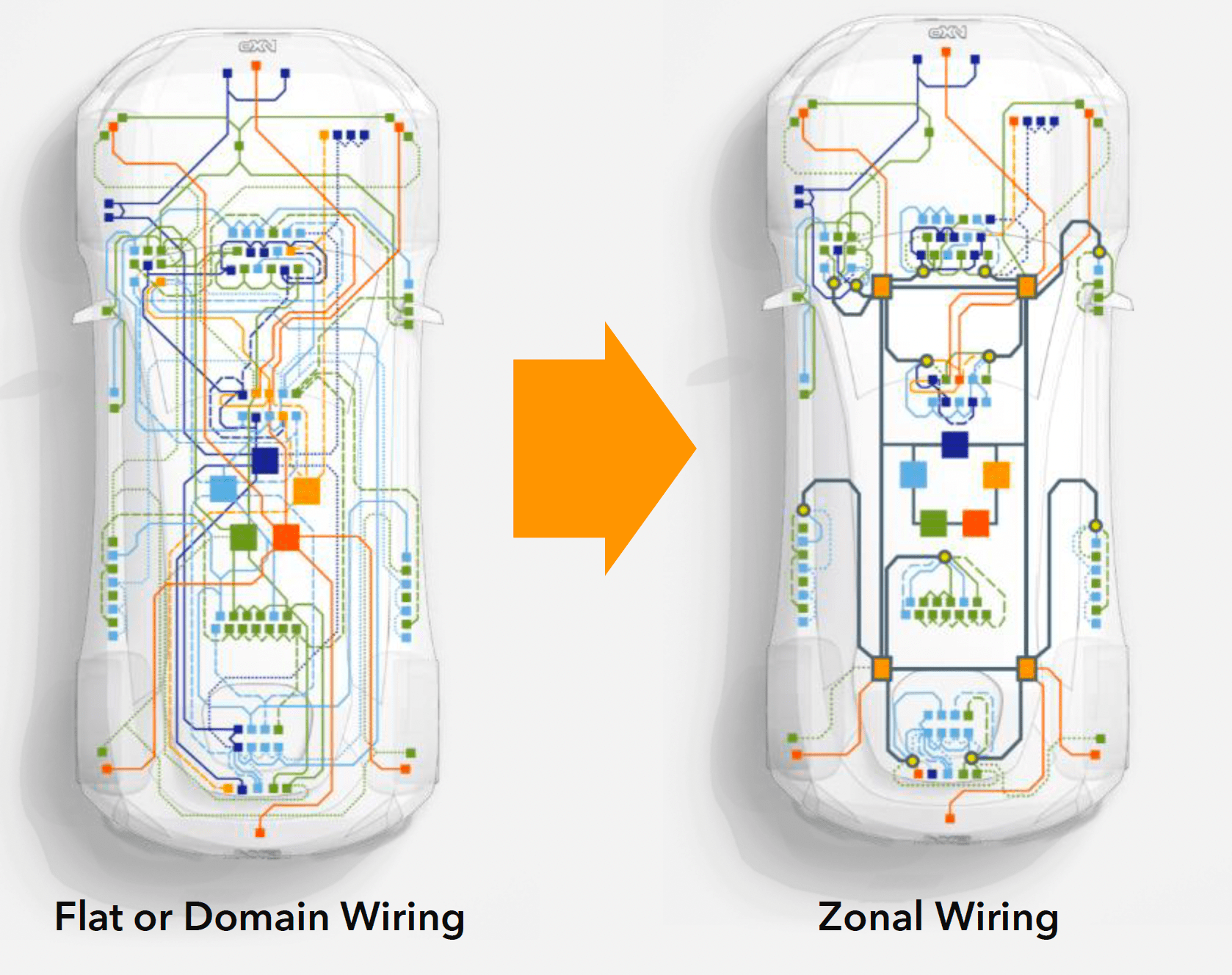
Zonal architectures will see a reduction in wiring loom complexity and weight, but increased dependence on high-speed networking to support the software-defined vehicle (Source: Digital interfaces are driving data in the automotive sector)
The overriding design requirement is lowering impedance at the point of contact to support the higher speeds. Material selection plays a big part. Silver-plated copper may be used to reduce insertion loss by keeping contact resistance and capacitance low. The dielectric design must minimize reflections and signal attenuation through optimized shielding. Connector manufacturers now use advanced electromagnetic simulation tools, enabling the highest performance from the latest designs.
Homogenous automotive networks
Imaging adds to the more conventional sensor data already in use, such as temperature, pressure, fluid levels, tire pressure, plus the many actuators used for comfort (e.g., seat position, electric window position, tail gate closure).
Most conventional sensors and actuators continue to have low bandwidth requirements by comparison, but they are much more numerous. Traditional Ethernet cannot compete with legacy multidrop buses, such as CAN, LIN, and FlexRay. Its point-to-point nature would necessitate an expensive switch if it were to replace all multidrop protocols.
The benefits of an Ethernet-based homogenous architecture become more compelling as the industry moves toward zonal architectures. Adopting 10BASE-T1S meets this desire. It provides commonality with the same upper layer (media access, or MAC) protocols while offering speeds of 10 Mb/s in a half-duplex multidrop configuration running over a single unshielded twisted pair connection. To meet the requirements of the specification, the physical interface must support at least eight nodes and a reach of at least 25 meters, but many commercially available PHYs exceed both numbers.
The purpose of 10BASE-T1S is to connect the various sensors and actuators used in vehicles, in a more efficient way that supports zonal architecture. This also gives access to standard Ethernet features that become more compelling in connected vehicles, such as advanced routing, time-sensitive networking, and better security.
The connected autonomous vehicle
The concept of the connected vehicle goes beyond a cellular network connection to deliver on-demand services, on the move. Vehicles will become active nodes on a very wide, very dynamic network.
The many terabytes of data generated daily by a connected vehicle will be used both by the car and the network. Autonomy will rely on data from all vehicles in the network, including location, speed, and direction of travel. In this respect, autonomy may be a misnomer, because each vehicle will rely on the network.
High-speed, low latency and time-sensitive networking using single-pair Ethernet and advanced video protocols over gigabit Ethernet are enabling the evolution toward full autonomy.
Visit Avnet to learn more connected vehicle solutions.
Like this article? Check out our other articles on Connected Vehicles and EV’s and HEV’s, our Automotive Market Page, and 2024 and 2025 Article Archive.
Subscribe to our weekly e-newsletters, follow us on LinkedIn, Twitter, and Facebook, and check out our eBook archives for more applicable, expert-informed connectivity content.
- Connecting the High-speed Data Networks of Autonomous Vehicles - March 25, 2025




