Humanoid Robots: Coming Soon to a Workplace Near You
Humanoid robots running marathons and performing domestic chores are making an entertaining splash on the internet, but robots that work safely and efficiently alongside people are rapidly advancing from sci-fi novelty to everyday reality.

Demand is growing for machines that operate in human-centric environments and perform similar tasks as humans (e.g., open doors, navigate stairs, lift and place items). Addressing the practical issues of functionality, safety, and efficiency when designing machines that are human-shaped and mimic human movements and abilities is a massive technical puzzle.
The humanoid robots in production today vary greatly based on purpose, and the purpose varies by region. Each purpose or market has different needs, so the earliest decisions are around what hardware is required, how the different pieces of hardware will interface, and where they will be placed — in the head, body, or limbs? This involves the integration of thousands of components by multiple companies that all require connectivity.
Awareness and communication
Cameras and lidars provide spatial awareness and are typically located in the most elevated position, the head. Cameras are the highest data rate transmission elements and will have to connect to the robot’s central processing platform, most likely located in the torso. This requires longer cables, which adds to the complexity.
“The high resolution camera standards for humanoid robots are going to be in the five to 10 Gb/s data rate range and require some care in choosing connector cabling solutions,” said Mark Waring, senior technical marketing specialist, Hirose Electric. One option, Waring said, is flexible printed circuit cable (FPC), a mature, lower cost technology that can be tailored to whatever length the application requires. ZIF (zero insertion force) connectors are a good termination option because the FPC goes directly into the connector and closes with a lever.
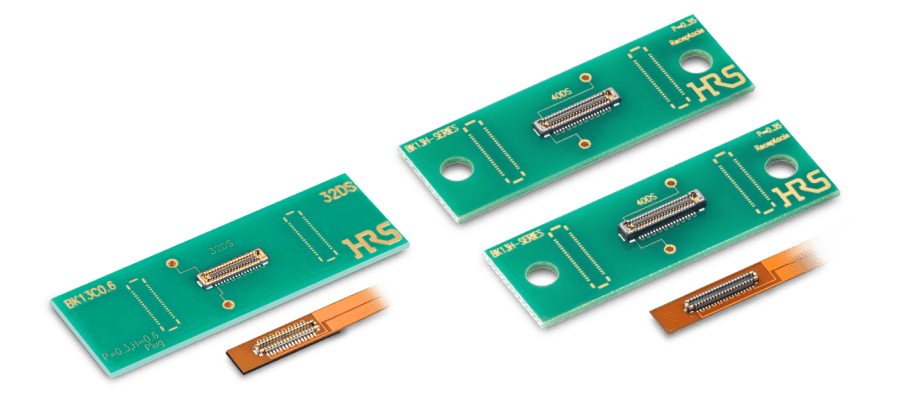
Hirose BK13 series is a strong two-piece connector solution
“Another option is a two-piece connector solution with half of the connector pair surface mounted onto the FPC and the other half surface mounted onto the PCB substrate, which could be a sensor board inside of the camera or the processing board down in the torso,” said Waring. One limitation with FPC is that, as a two-dimensional cable, it only bends easily one way; however, he said, “Designers get around that with some origami-type folding.”
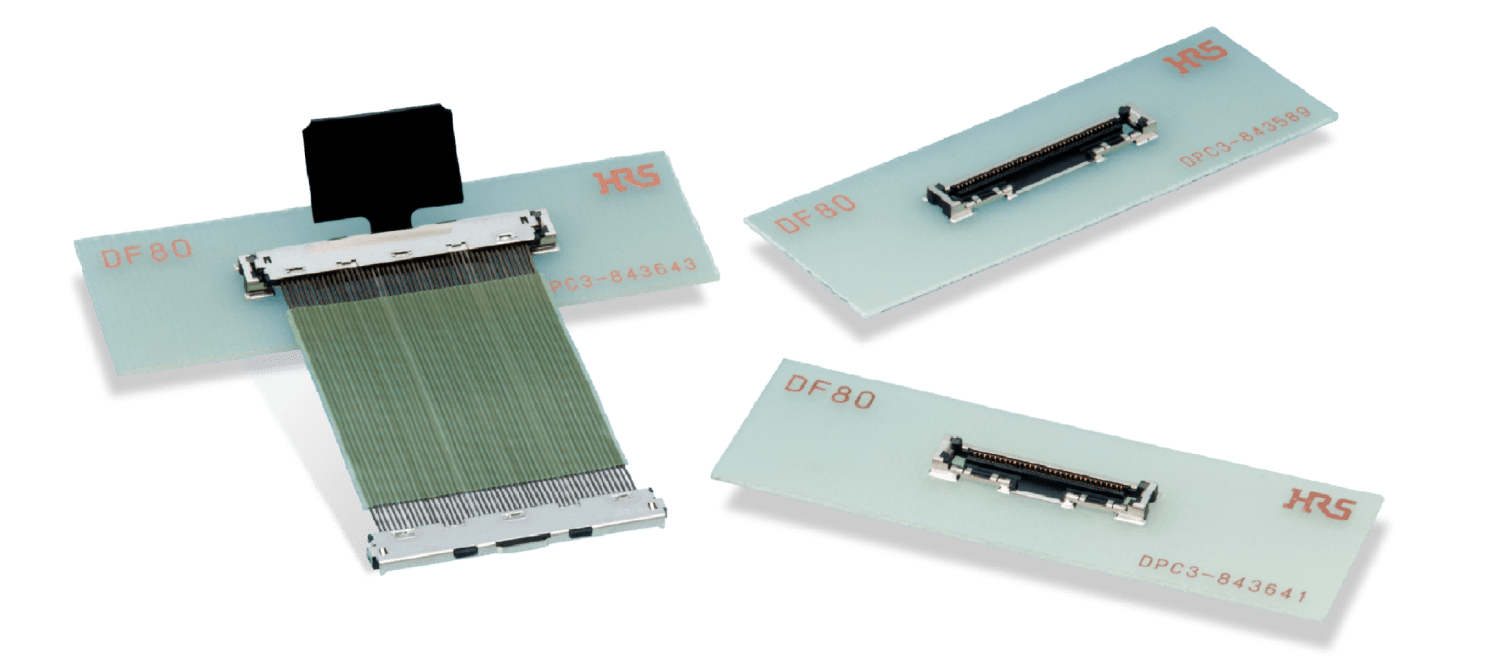
Connecting ganged micro coaxial cable to a PCB is an option that offers flexibility, as well as greater signal integrity due to individual shielding. The ribbon-type cable can be de-bonded and treated as a bundled core that can be “articulated through joints repeatedly, with more degrees of freedom than a permanent 2D-substrate, such as an FPC,” Waring said.
When more complex tasks necessitate high signal integrity, high speeds, and wire bendability, active optical solutions are a good option. “Hirose’s BF4M connector allows an engineer to harness the benefits of an active optical cable while maintaining a small form factor and a mechanical operation similar to that of a traditional electrical connector. The BF4M’s plug harness contains a semiconductor device that converts electrical signals into optical signals for transmission and optical signals back into electrical signals for reception,” said Michael White, technical marketing specialist, Hirose.
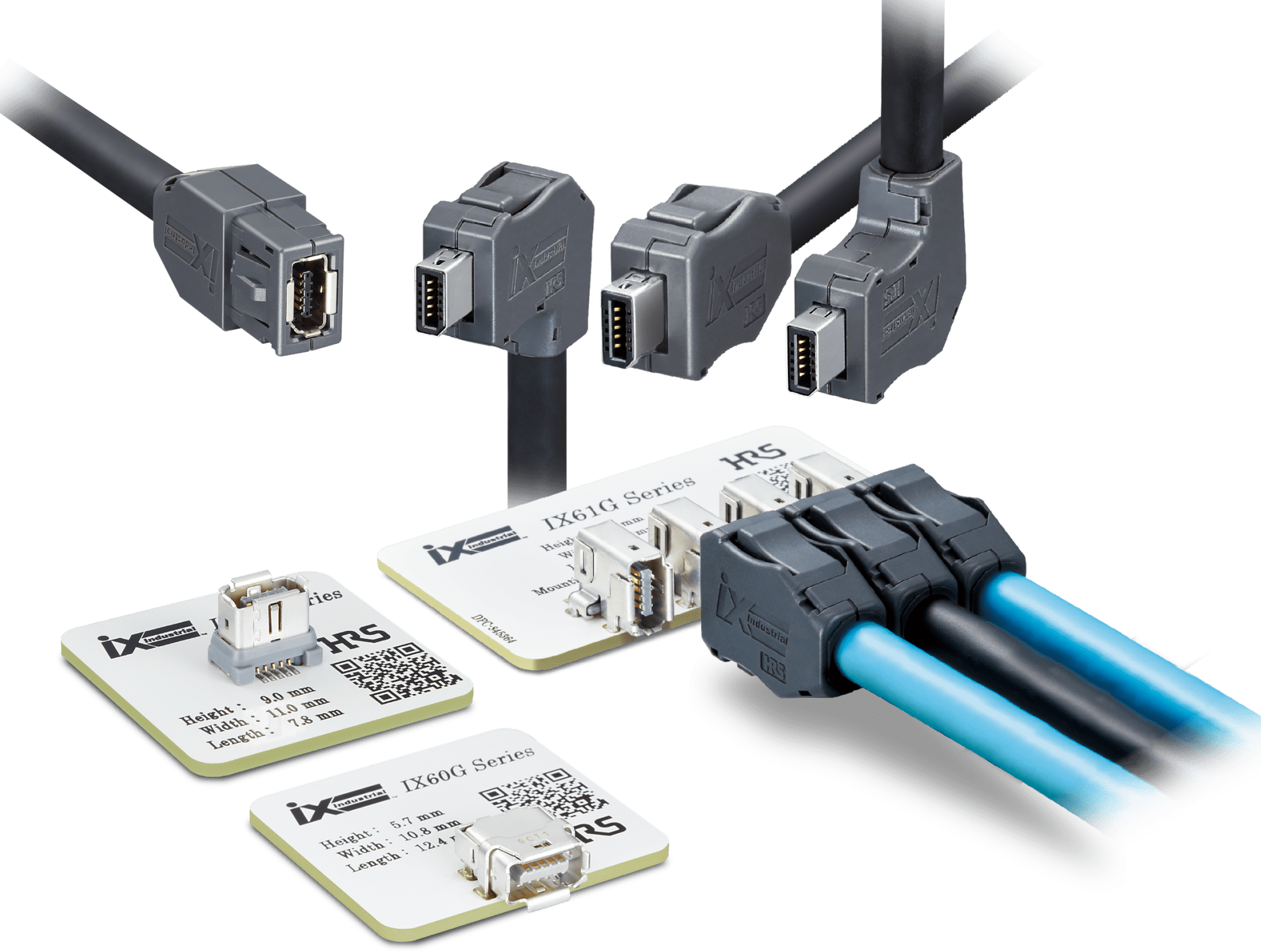
Lidar requires a robust, space-saving, high-speed transmitting input/output connector, like Hirose’s IX industrial connector — a smaller, more robust alternative to the RJ45, said White. USB works for lidar I/O connectivity, as well. “We have regular USB with good tactile feel and board retention available in over 30 variations. We also have an automotive rated USB-C, which we call AU1, that has a CPA (connector position assurance) feature, a form of secondary lock. One other example from the automotive space is GT50, which again is a very small, wired board connector with a 1 mm pitch.”
The head of the robot may have indicator lights for Wi-Fi or power, or an LCD or OLED screen for communication or human interaction. “The screens are more common in Korean or Japanese markets, to show information such as text or emoticons,” said Kyle Wells, electromechanical engineer, Hirose. “Sometimes there are motors for facial movement. I see this most used if a company is trying to show off their AI rather than just the humanoid robot itself. The motors take up space so you might be sacrificing incoming information such as camera or lidar data.”
Power delivery
“The torso is the heart of the computation and the power, so you’ll likely see the CPU (processing), and the battery source (power distribution to every other component) come from the torso,” said Wells. “Multiple PCBs must transmit both signal and power, requiring careful routing of wires to connect all components. Some connections will use larger board-to-board solutions, while others need wiring that runs parallel to the PCB for efficient layout. Our SnapBee collection is particularly useful here; it allows vertical press-fit insertion while keeping wires parallel to the board. This design lifts the wires just enough to clear components like resistors, capacitors, and ICs, enabling clean and organized routing.”
For their size, a significant amount of power distribution can be achieved with the FPC connection types mentioned previously. “We’ve begun pretty aggressively integrating power rails into those small form factor connectors. For instance, you might have a two to 100 signal pin connector all within the form factor of a few millimeters of length of a double row .3 or .35 millimeter pitch architecture, but on the two ends of those tiny connectors we’ve added metalized power rails, that can typically handle five amps, 10 amps, even up to 20 amps per end cap,” said Waring. “Of course, we recognize that may be far short of the power that’s required for some of these heavier duty actuators, but this is an interesting combination available to any designer, taking advantage of very small and relatively low cost connector solutions. We also see large humanoid robot OEMs choosing small discrete board-to-wire solutions for power and signal.”
Addressing balance
Balance is critical for static and dynamic movements. Movement over various obstacles or changing environments requires the balance of the legs. “Lifting an object, for example, is going to resist the motor or the actuator within the legs, so the motors have to apply a greater force if the object is heavier, and the robot is not going to move as quickly. So now you’re talking about lower speeds and a higher torque that typically involves either a geared motor or its own gearbox. On top of that, the robot has to align itself differently in preparation to lift heavier objects,” said Wells. “This is where you start talking about memory learning or AI learning. Sensors for pressure, acceleration, and rotation provide data for the robot to react to the environment.”
Because robots can fall, they need to be able to handle shock and vibration. The legs are meant to bend and shift, which requires a wiring solution that can handle cable strain and tension for when the leg is fully straightened.
The arms also impact balance and stability. “With upper body movement, such as picking something up quickly or swinging a golf club, the weight drastically changes the balance, so the weight of the interconnects and wiring in the robot, and how much space is available, is a major consideration,” said Wells.

Much of the complexity in a humanoid robot is in the hands. “The humanoid hand has tactile field sensors, small motors, and motor encoders connecting in that space,” said White. These require fine wire gauge micro wire-to-board connectors that balance the fine gauge and board retention.
Cable management
The complexity of humanoid robots makes cable management a particular pain point. Aside from adding weight and taking up valuable space, repairing damage to wires and cables can mean many hours of lost labor time. Branching adapters can reduce the amount of wire needed.
“Let’s say that you have a board-to-wire connector on a power distribution board that’s taking three amps from the board, you can route that three-amp input into an adapter that can then branch out 1.5 amps to two different sensors. Compared to traditional wiring that uses separate assemblies for each sensor, using a branch adapter simplifies the wiring and adds serviceability,” said White.
These are just some of the many connectivity issues for humanoid robots. For a more in depth look, watch Humanoid robotics: Connectors for today’s challenges and tomorrow’s needs, presented by Hirose and DigiKey.
Visit the Preferred Supplier page for Hirose to learn more about the company and its products.
Like this article? Check out our other Robotics articles, our Industrial Market Page, and our 2025 and 2026 Article Archives.
Subscribe to our weekly e-newsletters, follow us on LinkedIn, Twitter, and Facebook, and check out our eBook archives for more applicable, expert-informed connectivity content.
- Extreme Temperature Innovations for Aerospace and Defense - July 21, 2026
- Connectors for Soldier Systems Product Roundup - July 21, 2026
- July 2026 Connector Industry News - July 21, 2026




