CIMON Says: Design Lessons from a Robot Assistant in Space
Designing a service bot to function in microgravity is a unique challenge. Engineers at Airbus developed an autonomous robot assistant for the International Space Station using commercially available interconnects.
By Traci Browne and Paul Golata for Mouser Electronics robot
Of the more than 225 visitors to the International Space Station (ISS) in the past 20 years, June 2018 marked the first time that one of those visitors was a free-flying, autonomous service robot. CIMON — or as it is more formally known, the Crew Interactive MObile CompanioN — is an artificial intelligence (AI)-enabled robotic assistant that can speak, hear, see, and understand.

The International Space Station (ISS)
CIMON’s physical form is a plastic, 320mm-diameter, 5kg spherical head with no body. In fact, CIMON’s design was reportedly inspired by the Professor Simon Wright’s character (a flying brain) in the 1978 cartoon series, “Captain Future.” Much like the fictional professor-aided Captain Future, CIMON was responsible for assisting astronaut Alexander Gerst in the Columbus laboratory module of the ISS.
CIMON was developed and built by Airbus on behalf of the German Aerospace Center (Deutsches Zentrum für Luft- und Raumfahrt e.V. [DLR]) and was assigned to assist Gerst with three different tasks, making it both a service robot and a collaborative robot. The three tasks involved solving a Rubik’s Cube, conducting experiments with crystals, and carrying out a medical experiment that CIMON would film. In addition, CIMON could also serve as a complex database of all necessary information about operation and repair procedures for experiments and equipment on the ISS, allowing astronauts to keep their hands free while working. If the crew wanted to capture video for documentation purposes, CIMON could handle that as well.
Designing for Microgravity
While the design may have been inspired by science fiction, its spherical shape has a more practical application in a microgravity environment. Till Eisenberg, project manager at Airbus Friedrichshafen, said that the primary challenge was to create a robot that would be accepted by the astronauts. “Everything in the Space Station is rectangular, and it is a very technical environment. We wanted to have a calm point of focus,” said Eisenberg.
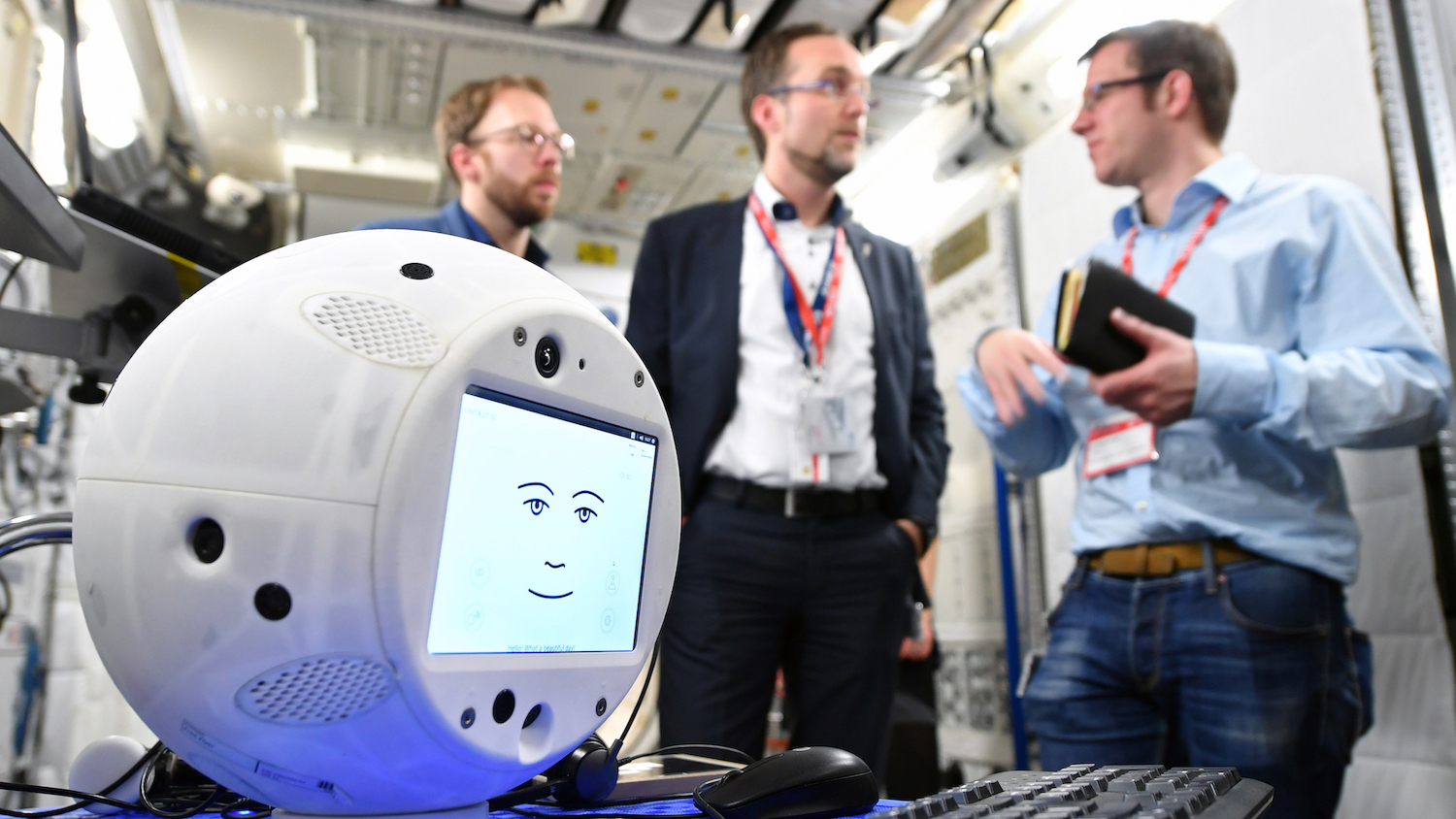
This is CIMON at the European Astronaut Center in Cologne, Germany. (Source: DLR/T. Bourry/ESA)
CIMON’s service as a calm point of focus, along with its ability to make the astronauts’ job more manageable, is important. Judith-Irina Buchheim, a medical researcher at the Ludwig-Maximilian University Hospital in Munich, thinks that the assistance CIMON provides astronauts will reduce their exposure to stress, which researchers believe has an impact on the human immune system. Its simple, spherical shape contrasts to the boxy, technical environment of the ISS and offers other advantages as well.
Because CIMON was the first free-flyer to operate on the ISS, safety was a significant concern. Typically, the rule for a microgravity environment is that everything must be strapped down to prevent objects from floating around and getting into things and places they should not. Eisenberg said that sharp edges or corners would be a hazard, as CIMON floats around the ISS, bumping against walls, equipment, or the astronauts themselves.
However, even if CIMON’s shape meant it would not hurt anyone, colliding with astronauts trying to work in an already-cramped space could quickly become annoying. To avoid that situation, CIMON is equipped with 12 ultrasonic sensors that enable it to detect obstacles and incoming objects. These sensors measure the distance from the obstacle or astronaut to CIMON.
Fourteen internal fans allow CIMON to move and rotate in all spatial directions. While CIMON is on the move, a dual 3D camera sensor collects information about the depth and relation from one feature to another and builds a map based on simultaneous localization and mapping (SLAM) algorithms. In addition, a frontal video camera and face detection software could focus on Gerst’s and the other astronauts’ eyes, allowing CIMON to orient itself to simulate eye contact. For example, if Gerst wanted to get CIMON’s attention when it was otherwise occupied, say looking out the window and enjoying the view, he could simply look in the robot’s direction and speak to CIMON. An array of microphones could detect the arrival direction of Gerst’s voice and prompt CIMON to orient himself until Gerst was in its camera’s field of view in order to establish eye contact.
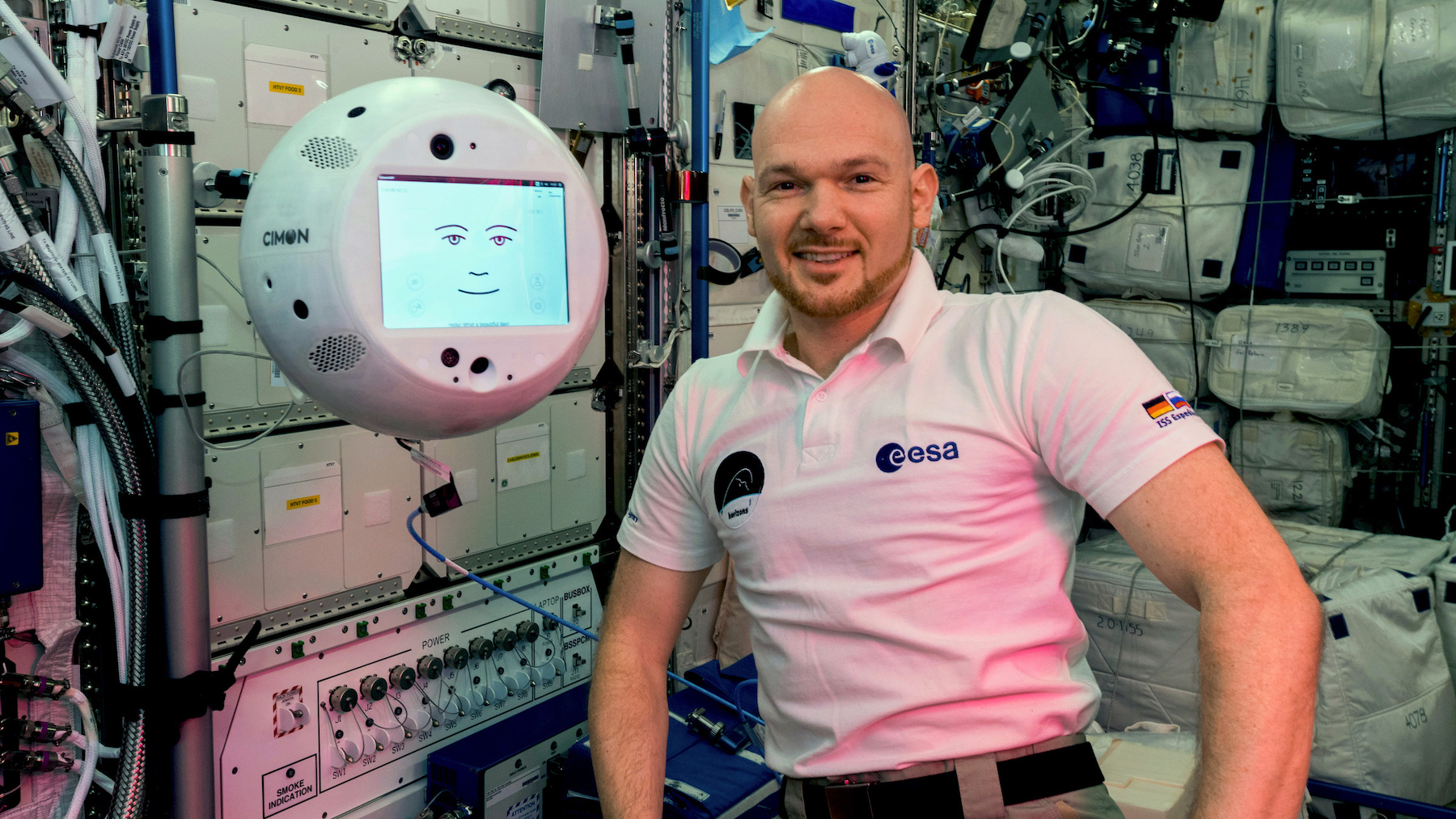
Alexander Gerst with CIMON in the Columbus Lab aboard the International Space Station.
For their final test before liftoff, Eisenberg and CIMON boarded the ESA’s Airbus A300 Zero-G for a parabolic flight test. Eisenberg described the flight, during which the plane flies up and down at 45° angles, as “a great experience” and “something everyone should do.” The decent is where microgravity occurs. This phase lasts about 20 seconds and a typical parabolic flight test will experience this about 30 times per flight.
Designing the Face and Voice
The ability to maintain eye contact and communicate are essential skills for an assistant, so the service bot needed a face. In CIMON’s case, the face is a simple line drawing displayed on a front-facing screen. Since acceptance by the astronauts was one of the engineers’ primary challenges, the team invited Gerst to be a part of the design phase to ensure that CIMON was an assistant that the astronaut could comfortably work with. Gerst was presented with several voices and faces to choose from to ensure that he would be happy with the result and to provide him with a sense of ownership and familiarity when he and the robot finally met on the ISS.
An integral part of CIMON’s ability to assist astronauts is the IBM Watson AI system, which provides the core speech comprehension element. When someone speaks a language to an AI-enabled robot like CIMON, the robot’s job is to identify intent. When a message arrives via audio stream, it is translated into written language so the system can understand and interpret its meaning. Once the identification of intent is complete, the AI system generates an answer based on several keywords in one sentence.
Eisenberg said that the AI will always understand words that align with its training, but that this is why a system that is working fine with a small project group can react in an unexpected way when a new person tries to interact with it. Aware of this potential problem, the team had Gerst interact with the AI for two sessions. These sessions made the AI familiar with Gerst and acclimated him to working with CIMON’s AI. Much like aeronautic radio chatter, the crew on the ISS has created a specific way of talking based on keywords that have well-defined intentions, so CIMON should not have any trouble interacting with other crew members in the future.
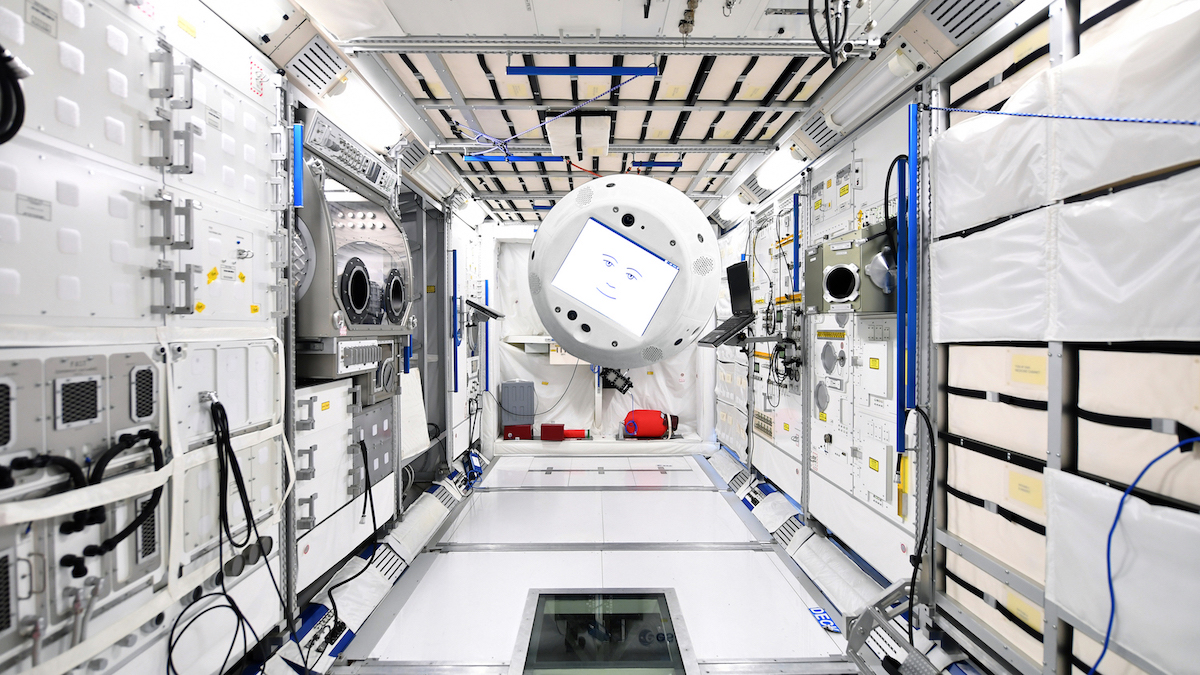
A composite image of CIMON on the ISS. (Source: DLR/T.Bourry/ESA)
Designing Interconnect Systems
CIMON depends on space-grade connector and cabling technology designed to provide high-reliability operation in extreme environments. Space-grade interconnect technologies call for extensive qualification to meet high performance standards established by governing authorities to ensure compliance in applications where failure would lead to catastrophic damage or losses. Reliability is of utmost priority to the success of the mission, so special materials are often warranted to ensure optimal performance. Although space is an extremely cold operating environment, the internal heating of components is possible in designs that have limited conventional cooling. This could potentially expose connectors and cabling to extremely wide and dynamically modulating temperature extremes. Small size and low mass are important to ensure that things fit into the limited available space and that mission objectives for overall payload size and space are maintained. Retention forces and mating connections must be ensured to avoid connection failures under even extreme conditions.
Amphenol Aerospace is a world leader in designing, manufacturing, and supplying high-performance interconnect systems for military, commercial air, and industrial markets. The company’s 2M Micro-Miniature Connectors are designed for harsh-environment interconnect applications that require high performance and are 71% lighter and 52% smaller than other connectors in their class, even though they also have a 60% higher contact density. These microminiature connectors are designed and tested to mil-spec standards, are comparable to MIL-DTL-38999 connectors, are intermateable and intermountable with existing microminiature aerospace and defense connectors, and can maximize size, weight, and power (SWaP) in a variety of high-reliability, harsh environment applications.
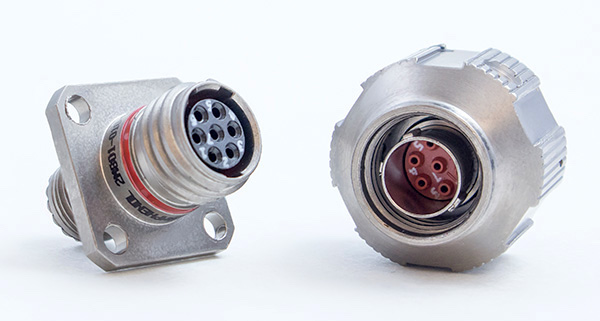
Amphenol Aerospace’s 2M Micro-Miniature Connectors
Outgassing (i.e., the release of gas that was dissolved, trapped, frozen, or absorbed in materials) is a serious concern in space applications. Electronic components can be impacted by the released gasses and their resultant effects, such as internal condensation. This is especially relevant within environments that may experience different atmospheric pressures than those on Earth. Additionally, extraordinary efforts are taken to ensure that interconnect designs help maintain system performance integrity against harsh environment conditions, including extreme shock, vibration, and stress.
Harwin manufactures a variety of high-reliability interconnects suitable for use in harsh environments by virtue of being designed to withstand extreme vibration, shock, and temperatures. Products such as the Harwin Datamate Family Connectors feature high-reliability, four-finger beryllium copper (BeCu) contact technology that ensures lossless data connections in even the most severe conditions. These connectors offer 100G shock, 40G bump, 10G vibration resistance and are rated for operating temperatures extending from -55°C (-67°F) to +125°C (+257°F).
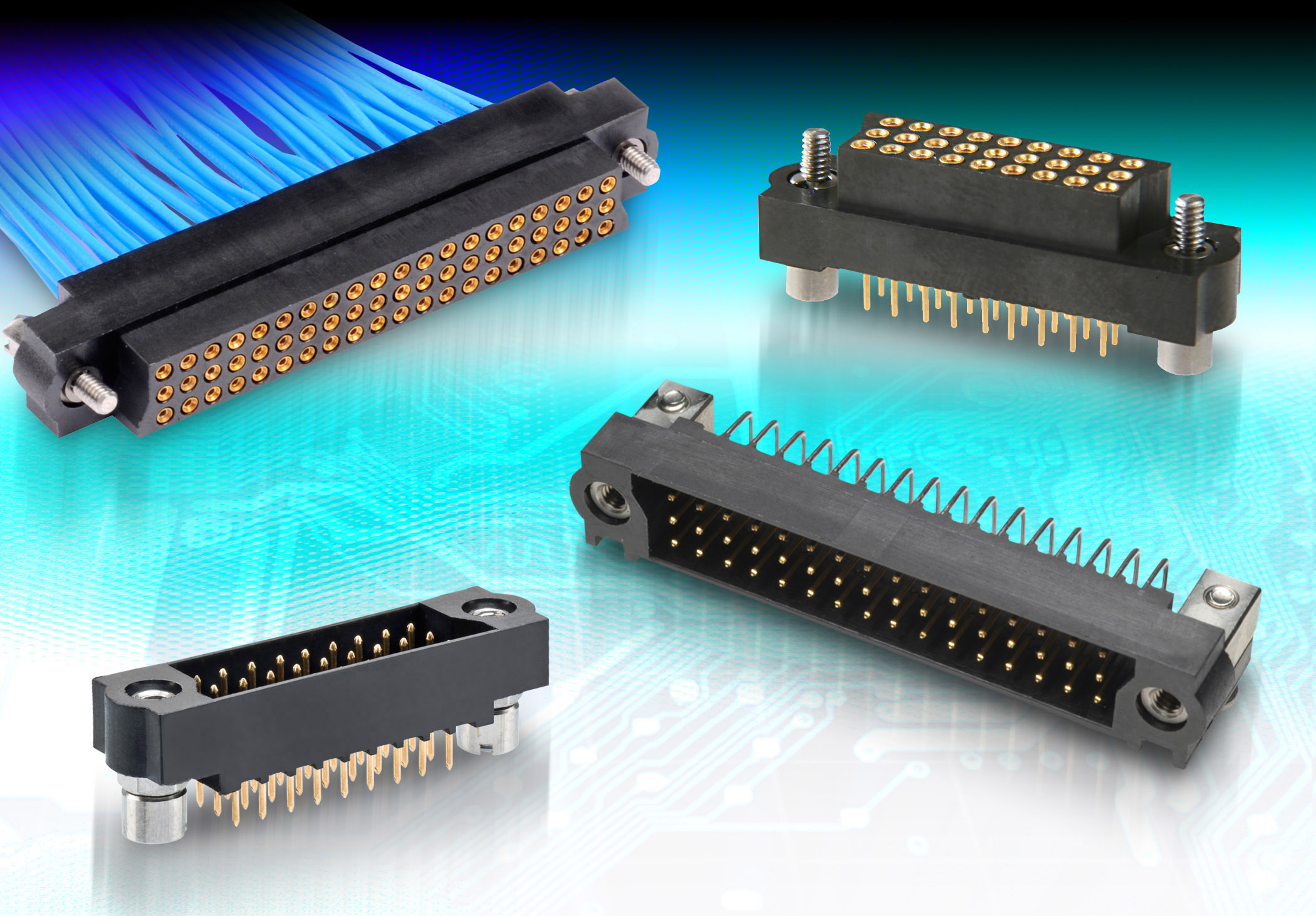
The Harwin Datamate family of connectors
Conclusion
In the future, scientists hope to use CIMON to observe the group effects that develop in small teams over extended periods of time, such as during missions to the moon and, eventually, Mars. They also hope to use CIMON to understand more about the social interaction between humans and machines. Eisenberg said service robots acting as flight attendants could potentially play an essential role in long spaceflight missions.
All in all, CIMON is pretty impressive for a robot created on a 3D printer and built with commercially available, off-the-shelf sensors and space-grade connector and cabling technologies in a span of less than two years. That timeline is impressive for just about any application, but for the space industry, it is epic.
Visit Mouser Electronics online.
Like this article? Check out our other New Technology, Robotics, Harsh Environment, and High Reliability articles, our Military/Aerospace Market Page, and our 2020 and 2019 Article Archives.
- Inside Device Connectivity: The Hidden Enabler of Software‑Defined Vehicles - July 14, 2026
- Bringing Modularity to Multi‑Board Systems - June 30, 2026
- Engineering’s Future is AI-Inspired, Human-Led - June 23, 2026




