30 Years of Automotive CAN
In 1991, the new Mercedes S-Class debuted as an engineer’s luxury sedan with dozens of innovations, including the first automotive CANbus on a production car. What started in luxury is today indispensable.
Cars with internal combustion engines are essentially mechanical devices that, in theory, need little to no electronics to operate. Gasoline engines require spark plugs for ignition, which can be operated with various ignition systems, including the extremely simple and highly reliable electromechanical magneto system. This simple 19th-century electrics technology is still used in piston aircraft engines for its extreme reliability. Diesel engines require no spark for ignition and can be operated entirely mechanically, as some marine diesel engines still are. If electrics are so fundamentally insignificant for automotive engine operation, what’s all the fuss around electronics in modern cars?
Simplicity may have its advantages, but adding complexity through electronics can offer finer levels of control and efficiency for engine operation. By the 1980s, advancements in microprocessors and microelectronics allowed activities like fuel delivery to be controlled by engine control units (ECUs) through electronic fuel injection. Direct ignition systems, like the one introduced by Saab in 1985, completely dispense with electromechanical components like distributors and connect the spark plugs directly to the ECU, allowing a computer to precisely control ignition timing and adapt to different fuel grades and temperatures using inputs from other sensors.

Modern vehicles must accommodate cabling for a host of automotive technologies, including engine function, automated safety systems, cabin comforts, lighting, and for this Prius, energy monitoring and charging systems.
How Much Wiring is too Much Wiring?
Complexity allowing for precise, automatic control is great but, at some point, electronic complexity becomes a problem in the limited space available in a car. By the early 1980s, wiring architectures for the most electronically complex vehicles (often European luxury vehicles) were reaching a limit of viability. In the wiring architecture of the time, every component that needed information from a sensor or had to communicate with another component had to be wired directly to that sensor or component. For example, with an electronic dashboard, an electronically controlled automatic transmission, and an automatic braking system (ABS), there would be individual wires running from each of the components to sensors like the vehicle speed sensor. This is analogous to having a discrete, dedicated road from your house to every place you want to drive. As automotive electronics increased, wiring volume, weight, and complexity across all the car’s systems became substantial.
Developing CANbus
In 1983, the German engineering and technology firm Robert Bosch GmbH began working on a solution to the limitations of automotive wiring architectures, both in terms of space taken up by wiring harnesses and functionality. The solution had to be compact, cost-effective, and robust enough to operate in an electromagnetically noisy environment.
Their solution was the controller area network (CAN), a serial bus network that allowed for communication between any network nodes — analogous to a single road passing your house and connecting all the places you want to drive to. The system’s protocols allowed for the highest-priority information to be delivered first and had fail-safes that allowed faulty nodes to be disconnected without impeding the network. It’s also robust by design. CANbus wiring uses a pair of wires known as CAN high and CAN low. They are twisted tightly together to ensure that electromagnetic interference affects the signal in both wires uniformly, limiting errors.
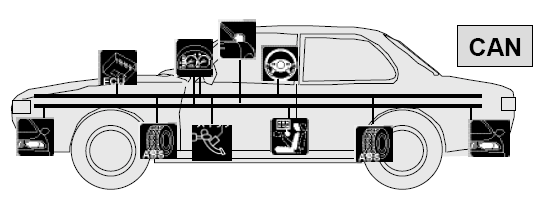
This diagram illustrates how automotive CANbus networks facilitate greater equipment communication while reducing wiring. (Diagram by Florent.david.lille1, published per CC BY-SA 3.0 via Wikimedia Commons.)
CANbus allowed for a massive reduction in the amount of wiring needed to connect electronic systems in cars, and the higher data throughputs it enabled allowed for new features and functionality. The reliability inherent in the protocol’s design also allowed CAN to be used for critical control activities like communication between the engine and transmission control units.
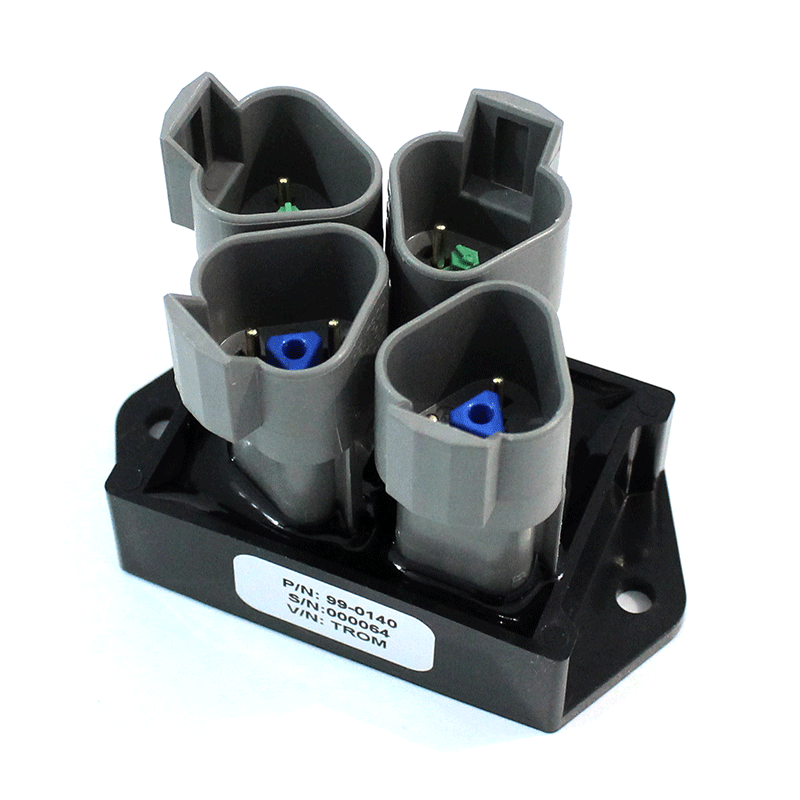
CANbus splitters provide a cost-effective and space-efficient way of connecting multiple devices to the J1939 CANbus. Modules such as the Trombetta CANbus control module, available from Waytek, reduce cost by eliminating Y adapters and extra harnesses typically used to provide additional connections to the bus, while at the same time allowing for shorter cable runs to each device.
CAN in Production
After CAN’s debut at the 1986 SAE Congress in Detroit, controller chips were developed by Intel and Phillips, and the protocol first made it into a production vehicle in the Mercedes W140 S-Class in 1991. This luxury sedan featured numerous electronic innovations and gadgets, including electronic climate control, advanced adjustable electronic seats, mirrors, and steering wheel, and modes for specific driving conditions, like driving with snow chains fitted. The CANbus would go on to enable increasingly complex electronics in (mostly) European cars, and today Mercedes, BMW, and Audi vehicles in particular can have 70 or more ECUs connected by multiple CANbus networks, allowing for features from headlight failure warnings on the dash to infotainment integration. More recently, CAN systems have been adopted by North American and Asian manufacturers.

Products like TE Connectivity’s Raychem CANbus cables offer physical ruggedization for applications like military vehicles and aerospace applications on top of the protocol’s inherent robustness.
The high electronic complexity of modern cars may not be to the tastes of people who prefer simplicity and reliability, but the CAN integration of systems also allows for unified, vehicle-wide diagnostics through the onboard diagnostics (OBD) standards fitted to all cars by law. CAN has become so well-respected as a reliable communication protocol that, in addition to automotive applications, it is now also used in high-stakes spheres of industrial automation, building automation, and maritime, aviation, and medical electronics.
The Future of CAN
While CAN offered enormous advantages for controlling systems on internal combustion vehicles, its reliability and compactness are also perfectly suited for controlling the complex electronic systems of electric vehicles. In 2012, Bosch completed development of the controller area network flexible data rate (CAN FD) protocol, which offers higher data throughputs than traditional CAN. This standard helped enable internet connectivity for automotive applications like self-driving vehicles, and is also used in the industrial IoT. In the past, CAN-enabled complex electronics could be viewed as adding unnecessary complexity to the mechanical systems of internal combustion cars. Today, they’re allowing electric vehicles to brandish their own, much simpler mechanics in extremely reliable, durable, and efficient production cars.
2021 marks 30 years since the first production car with CAN went on sale and nearly 40 years since the technology was first developed, and the protocol remains integral to electronics networks that demand reliability and small form factor. This decades-old protocol has not only survived, it is still actively enabling the leading edge of electronics and automation.
Like this article? Check out our other Connected Vehicles, Connector Basics, and Harsh Environment articles, our Wire and Cable Assemblies and Automotive Market Pages, and our 2021 and 2020 Article Archives.
- 30 Years of Automotive CAN - March 30, 2021
- Industrial Interconnects Enable Advanced Process Controls in the Fresh Water Industry - February 23, 2021
- Remote Work Opens Network Infrastructures to Security Risks - December 8, 2020




